Designing a tunable rotary damper for biomimetic quadruped hind limb joints.
The Agile and Adaptive Robotics Lab (AARL) at Portland State University (PSU) is using a biomimetic quadruped robot to study artificial neural control. To achieve truly biomimetic motion, springs and dampers are being integrated into the quadruped’s hind limb to better mimic spring and damping characteristics present in animals.
For my PSU senior capstone project, I collaborated on designing a tunable rotary damper that will allow future researchers in the AARL to mechanically tune the quadruped limb’s damping to mimic a variety of animal damping characteristics. We also built a pendulum-style damper tester to model the relationship between torque and angular velocity in the damper.
Tunable Rotary Damper

Turning the front dial of the damper changes the drag on the dial from the surrounding viscous fluid, resulting in a change of required torque to rotate the paddle and shaft.

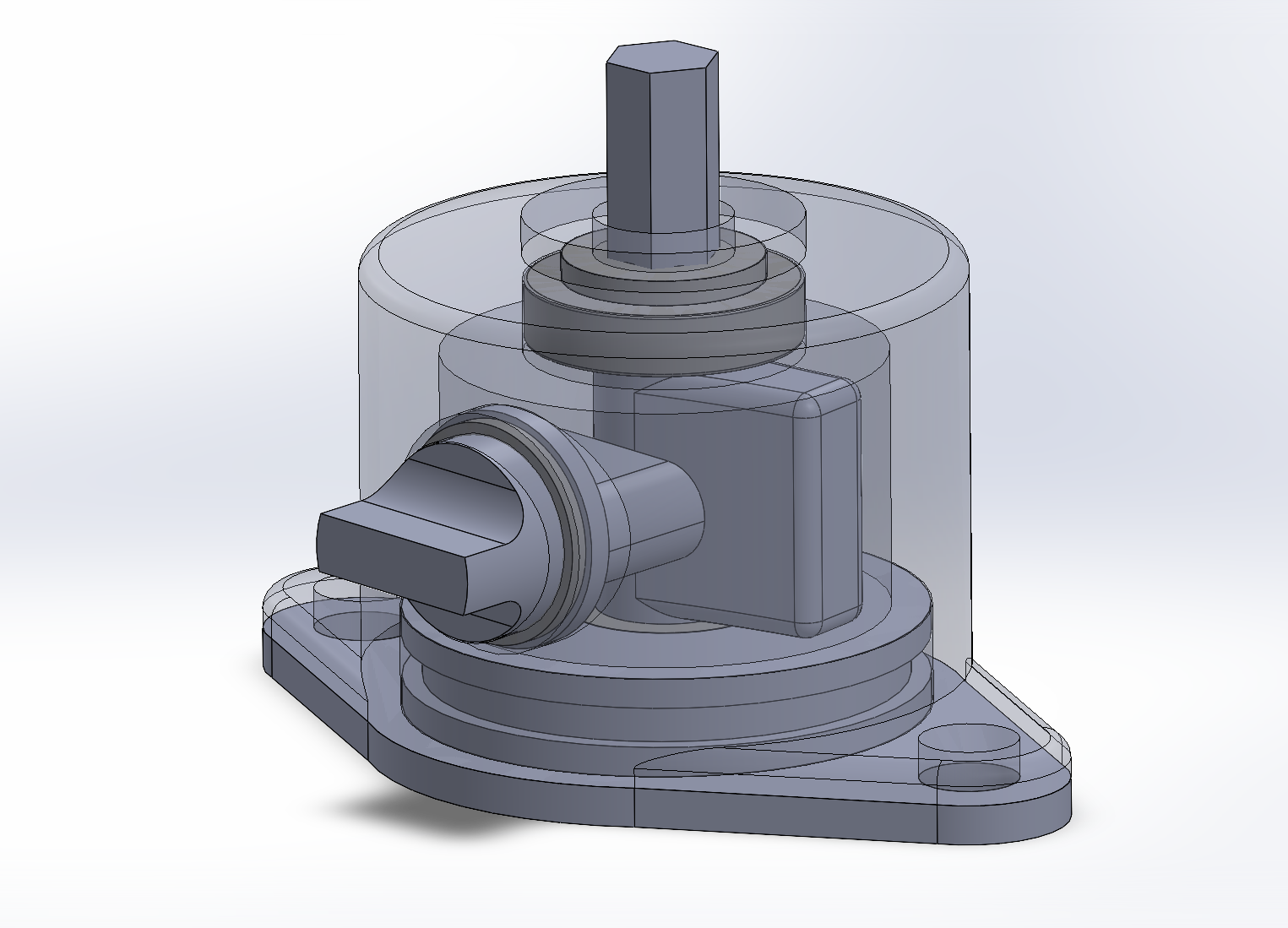
Tunable Rotary Damper Prototype 1

Pendulum-style Damper Tester

Angular position vs. time of the pendulum at varied tunable damper settings, demonstrating an increase in damping when the paddle is in the perpendicular position.