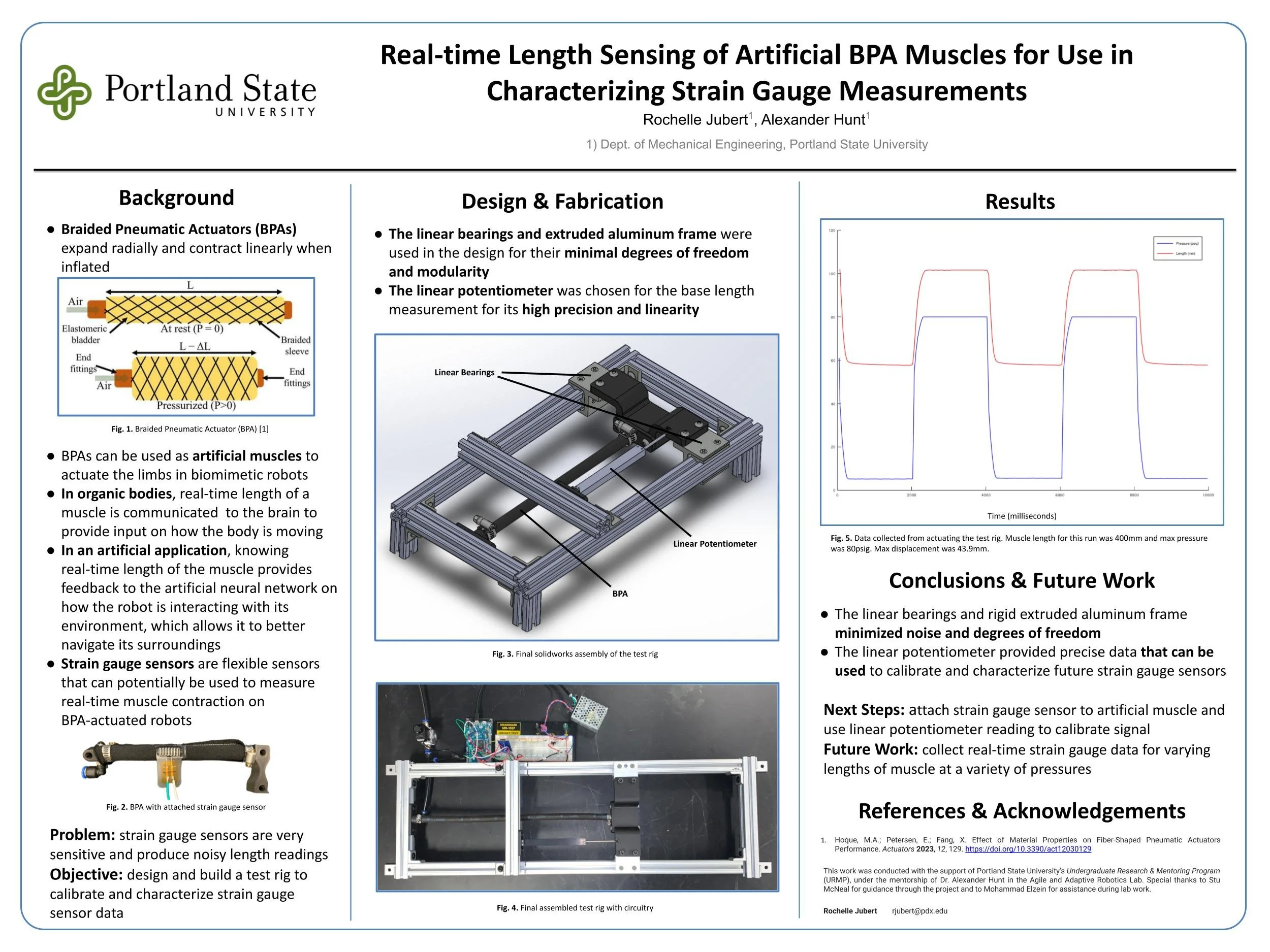
Real-time length sensing of artificial BPA muscles.
The Agile and Adaptive Robotics Laboratory (AARL) at Portland State University uses a biomimetic quadruped robot to study artificial proprioceptive neural networks. To complete the robot’s proprioceptive feedback loop, real-time time sensor readings of the length of the quadruped’s artificial BPA (braided pneumatic actuator) muscles is required. During my time in the AARL, I independently designed, assembled, and operated a BPA length-sensing test rig used to collect calibration data for flexible strain gauge sensors. These sensors mimic the function of muscle stretch receptors and once integrated into the robot’s design, will contribute to achieving its proprioceptive ability. My research was accepted to yearly international conference on biomimetic and biohybrid systems, Living Machines, and will soon be available for reference.
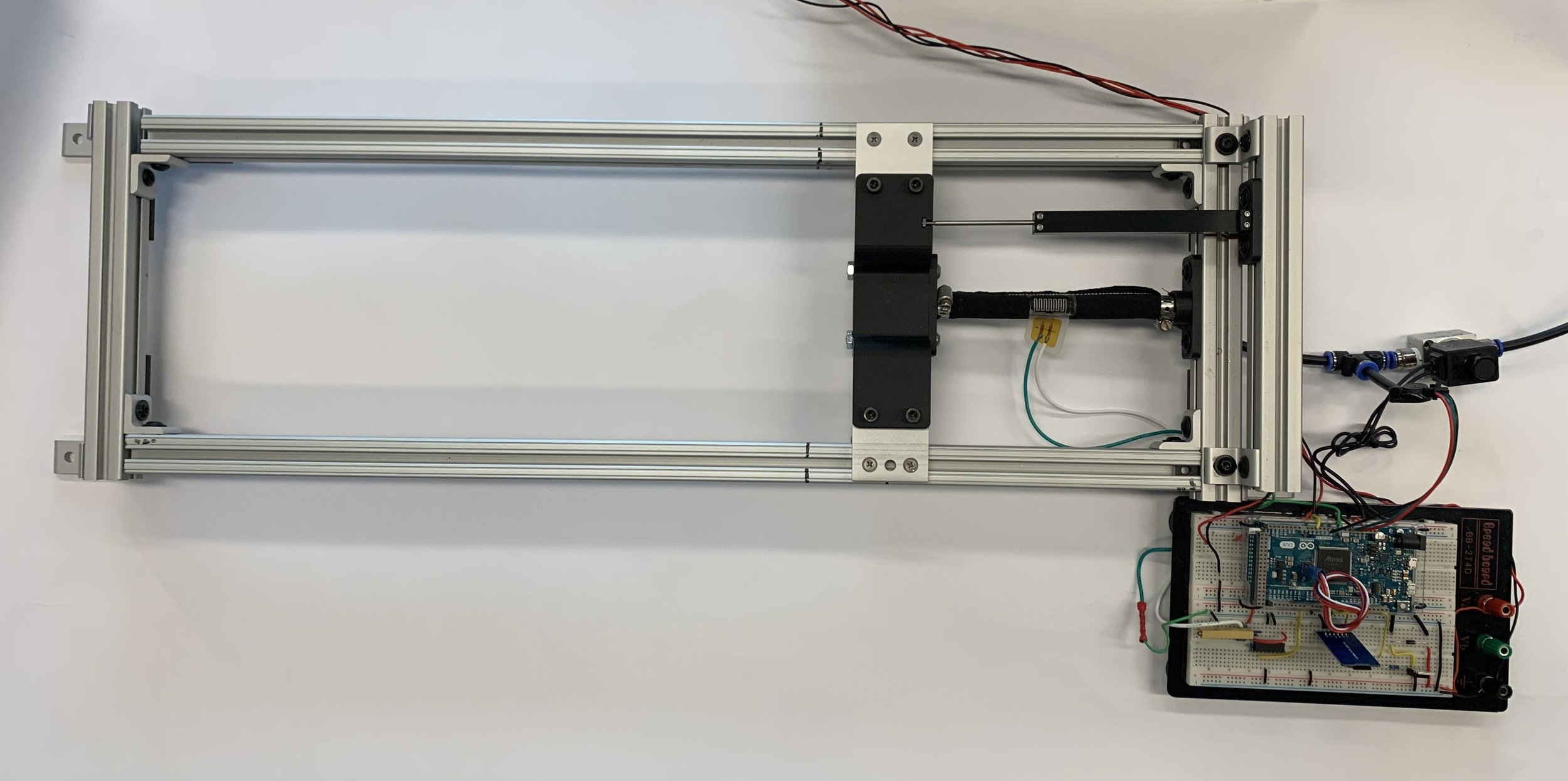
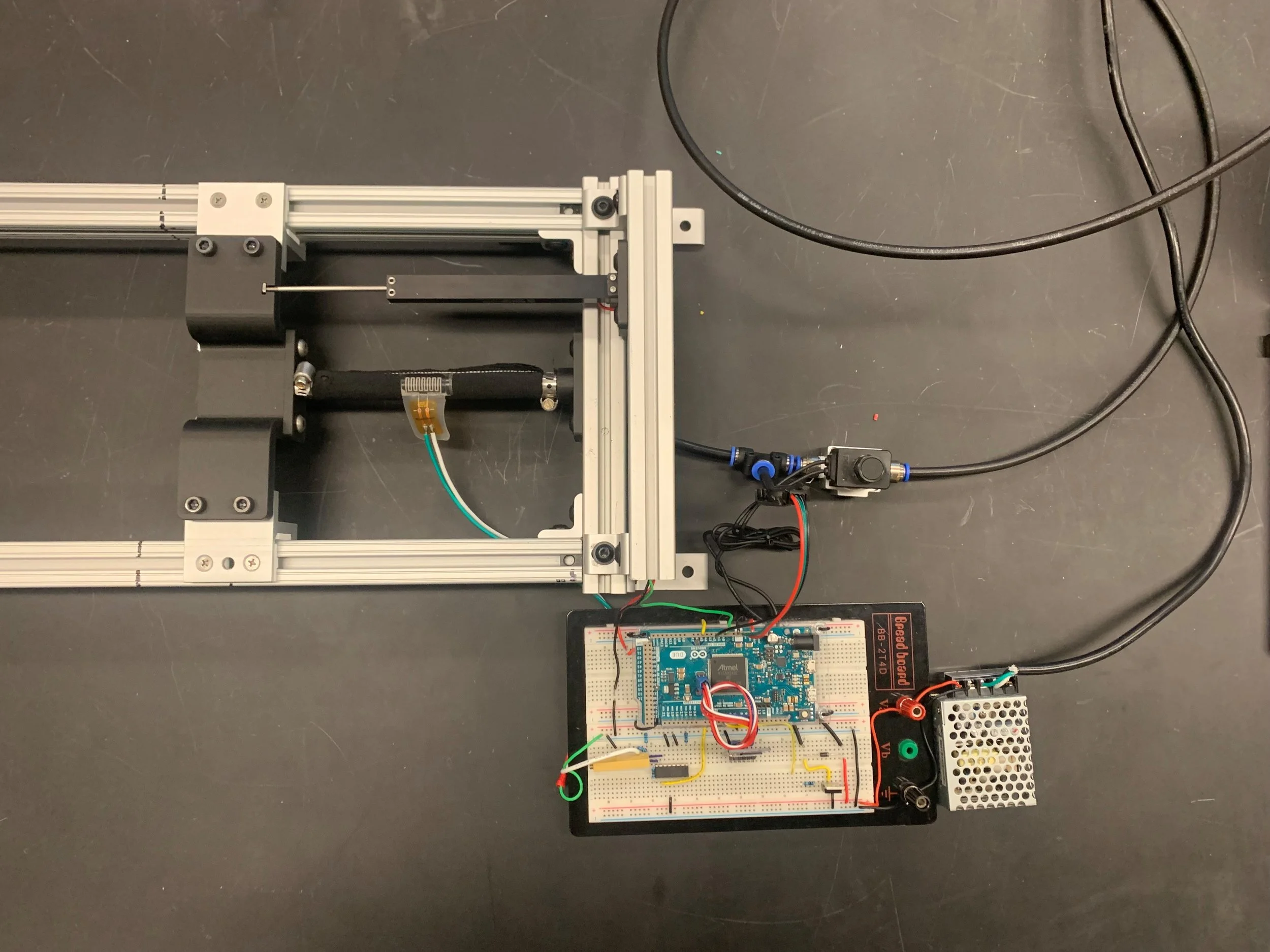
BPA Test Rig
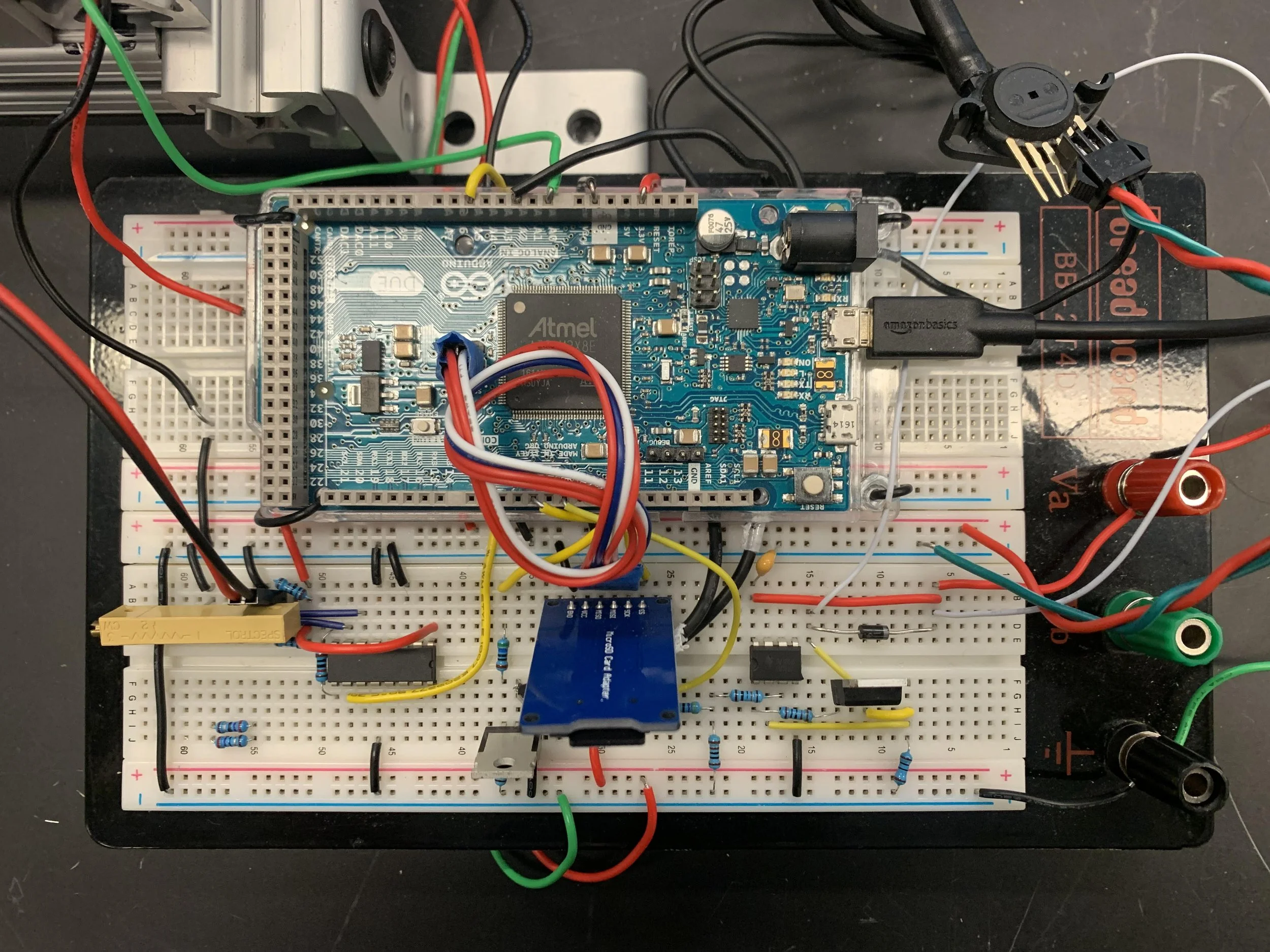
BPA Test Trig Electronics
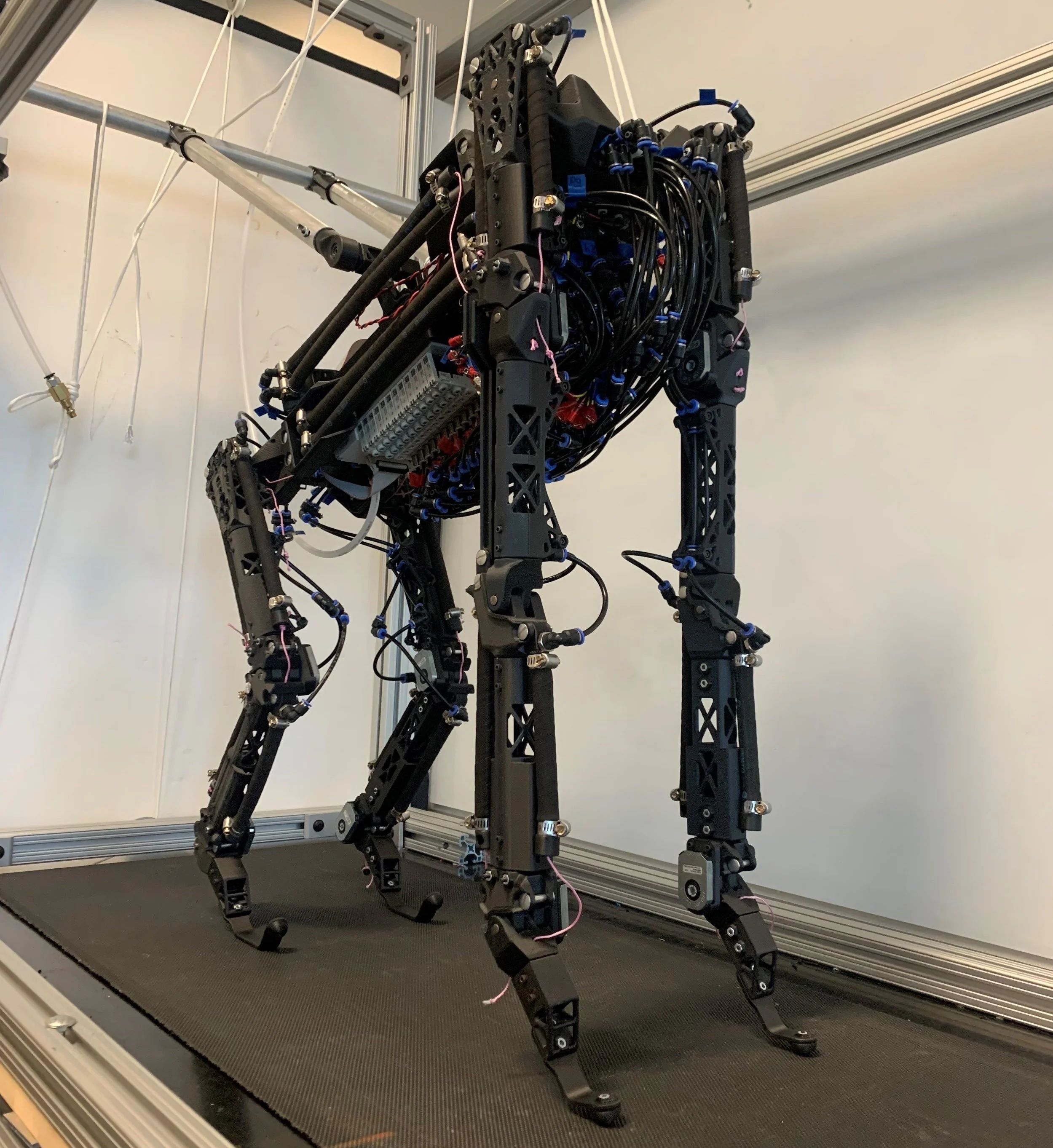
AARL Biomimetic Quadruped Robot

Experimental 3D Strain Gauge to Muscle Length Calibration (Inflation)
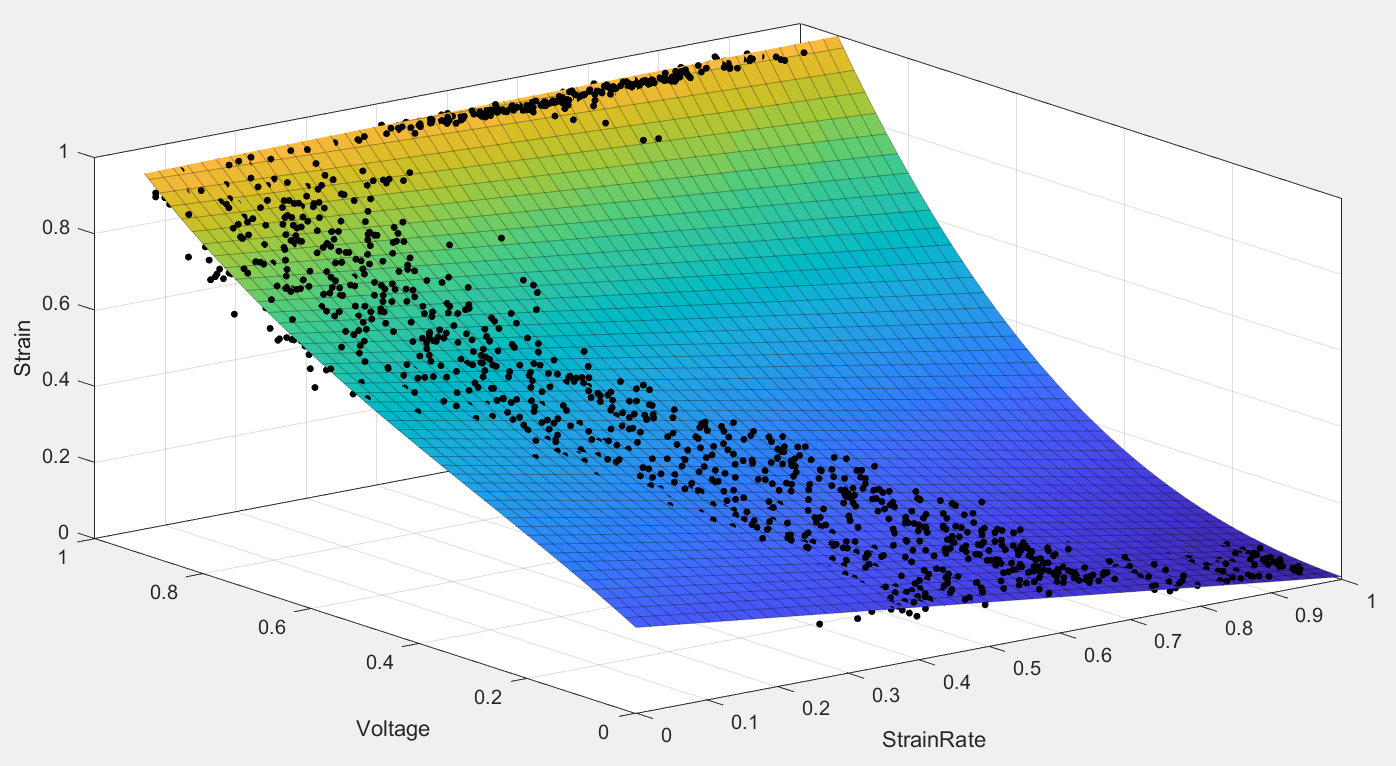
Experimental 3D Strain Gauge to Muscle Length Calibration (Deflation)

Experimental 3D Calibration Applied to Random BPA Muscle Behavior
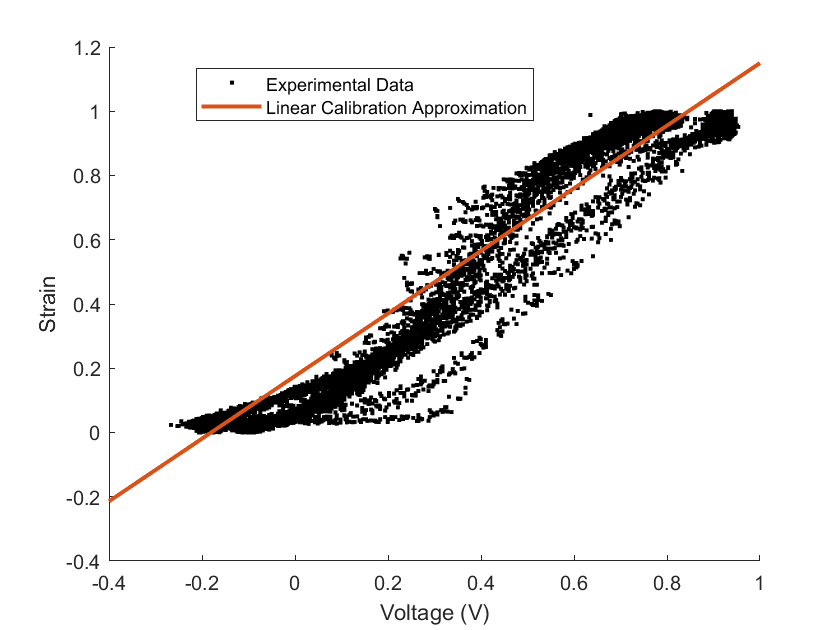
2D Linear Experimental Calibration Demonstrating the Presence of Hysteresis in the Strain Gauge
2023 PSU Undergraduate Research and Mentoring Program (URMP) Symposium Poster